Ходящие машины
Марк Х. Рейберт и Айвен Е. Сазерленд
Пешее движение трудно воспроизвести искусственным путем, но решение этой проблемы, возможно, станет реальным благодаря современной технике управления. Эксперименты с прыгающими и ползающими машинами — еще одно средство на пути к пониманию механизма естественной ходьбы.
Многие машины имитируют природу; наглядным примером является самолет, копирующий парящую птицу. Единственная форма передвижения животных, воспроизвести которую пока еще удается с трудом, — это ходьба. Возможно, современные ЭВМ и системы управления с обратной связью окажут существенную помощь в создании ходящих машин. Этот вопрос мы сейчас изучаем, используя машинные модели и действующие механические конструкции.
Пока нам удалось построить две такие машины. Одна имеет шесть ног и управляется человеком; она предназначена для исследования особенностей передвижения насекомых, при котором равновесие не играет существенной роли. У второй машины только одна нога, и передвигается она скачками; эта модель используется для изучения проблем равновесия. Первый вид движения мы называем ползанием, чтобы отличать его от ходьбы, при которой обязательно требуется сохранять равновесие, а также от бега, который сопряжен еще и с полетом. Наша работа помогла нам понять, каким образом человек и животные ползают, ходят и бегают.
В отличие от колеса, которое при движении, находясь под нагрузкой, постепенно меняет точку опоры, нога меняет точку опоры сразу, и для этого она должна освободиться от нагрузки. Чтобы система на ножных опорах ползала, ходила или бегала, каждая нога ее должна попеременно находиться то в положении, когда она опирается о землю, будучи нагруженной, то в положении, свободном для перемещения, когда нагрузка снята. Такое циклическое чередование этапов движения — стойки, когда действует нагрузка, и переноса, когда нагрузка снимается, — наблюдается во всех системах, передвигающихся на ногах. Каждый, кто скакал на лошади рысью или галопом, знает, что чередование стойки и переноса сопровождается хорошо ощутимым движением вверх-вниз. Вероятно, можно построить такую машину с ножными опорами, у которой это сопутствующее движение почти полностью будет отсутствовать.
Наши и другие работы в этой области могут в конечном итоге привести к созданию машин, которые будут ползать, ходить и бегать по мягкому грунту, преодолевать рытвины и ухабы на пересеченной местности, непроходимой для транспортных средств на колесном и гусеничном ходу. Такие машины смогут найти полезное применение в промышленности, сельском хозяйстве и военном деле. В условиях труднопроходимой местности машины на ножных опорах имеют явные преимущества. Они могут выбирать точки для лучшей опоры, уменьшать крен, а также перешагивать через препятствия. В принципе эксплуатация транспортных средств на ножных опорах может почти не зависеть от характера пересеченной местности. Цель наших исследований заключалась в постановке расчетных задач на ЭВМ для управления процессом движения ног и их координации. Понятно, что составление крайне сложных машинных программ для этих целей — один из важных этапов в работе по созданию ползающих, ходящих или бегающих машин с устойчивым передвижением.
Как уже отмечалось, передвижение одних случаях возможно только при наличии динамического равновесия, в других оно не требуется. Так, насекомым не нужно сохранять равновесие, поскольку у них как минимум шесть ног, три из которых всегда могут быть задействованы для опоры в виде треножника. При просмотре ускоренной киносъемки движения насекомых видно, что они, передвигаясь ползком, как правило, одновременно опираются на три ноги, чередуя их.
В принципе можно построить ползающую машину, не нуждающуюся в сохранении динамического равновесия, и на четырех ногах, но двигаться такая машина будет неуклюже, потому что при каждом шаге ей придется корректировать положение центра тяжести, чтобы не перевернуться. Для удовлетворительной работы машины без динамического уравновешивания она должна иметь как минимум шесть ног — наименьшее число ног, при котором всегда обеспечивается опорный треножник, даже если половина из них находится в поднятом положении. Сейчас уже построено несколько шестиногих машин, отличающихся габаритами и конструкцией. Все они управляются ЭВМ.
Управляющая программа выполняет пять задач. Во-первых, она регулирует походку машины, т.е. задает последовательность и характер движения ног, при которых обеспечивается перемещение машины. Шестиногие машины могут передвигаться посредством поочередного поднимания одной ноги, либо двух, либо трех ног одновременно.
Наиболее простой является регулярно повторяющаяся последовательность движения ног. Указанием такой последовательности описывается походка машины. Например, походку с одновременной опорой на три ноги можно записать как 1-5-3; 6-4-2, где через дефис указаны номера ног, одновременно находящихся в одном положении, а точкой с запятой отделена последовательность. Аналогично можно описать походку с поочередным подниманием по одной ноге: 3-2-1-4-5-6 и 3-4-2-5-1-6. Походка, при которой поднимаются несколько ног одновременно, безусловно, позволяет ускорить движение машины, но при этом будет меньшая устойчивость по сравнению с походкой, при которой машина одновременно опирается на большее число ног.
Вторая задача управляющей машинной программы заключается в том, чтобы не допускать опрокидывания машины. Она опрокинется в том случае, если проекция ее центра тяжести сместится за пределы создаваемой ногами опорной базы. ЭВМ должна постоянно контролировать положение центра тяжести машины с учетом размещения точек опоры и обеспечивать по возможности наибольшую опорную базу. При простых походках необходимую опорную базу можно обеспечить с помощью выбора геометрии ног, а при более сложных потребуется тщательный расчет на статическую устойчивость.
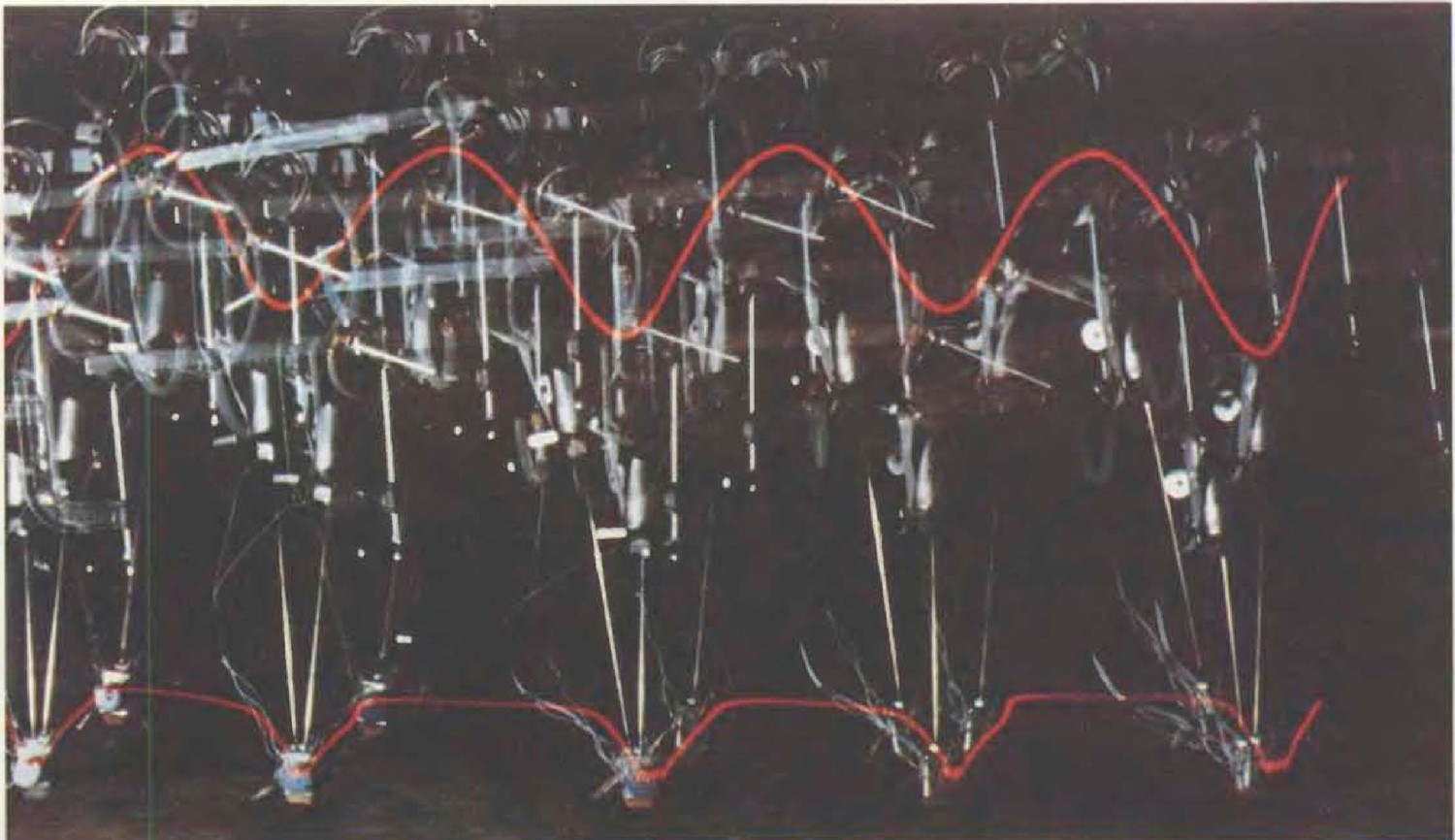
ПРЫГАЮЩАЯ МАШИНА, построенная Рейбертом, одним из авторов статьи, для изучения проблем управления машинами в процессе движения. Нога машины приводится в действие сжатым воздухом, а ее движением управляет компьютер с обратной связью. В компьютер поступают сигналы от датчиков положения, установленных на машине. В данной конструкции имеется ограничительный рычаг, который удерживает машину в равновесии в одной плоскости.
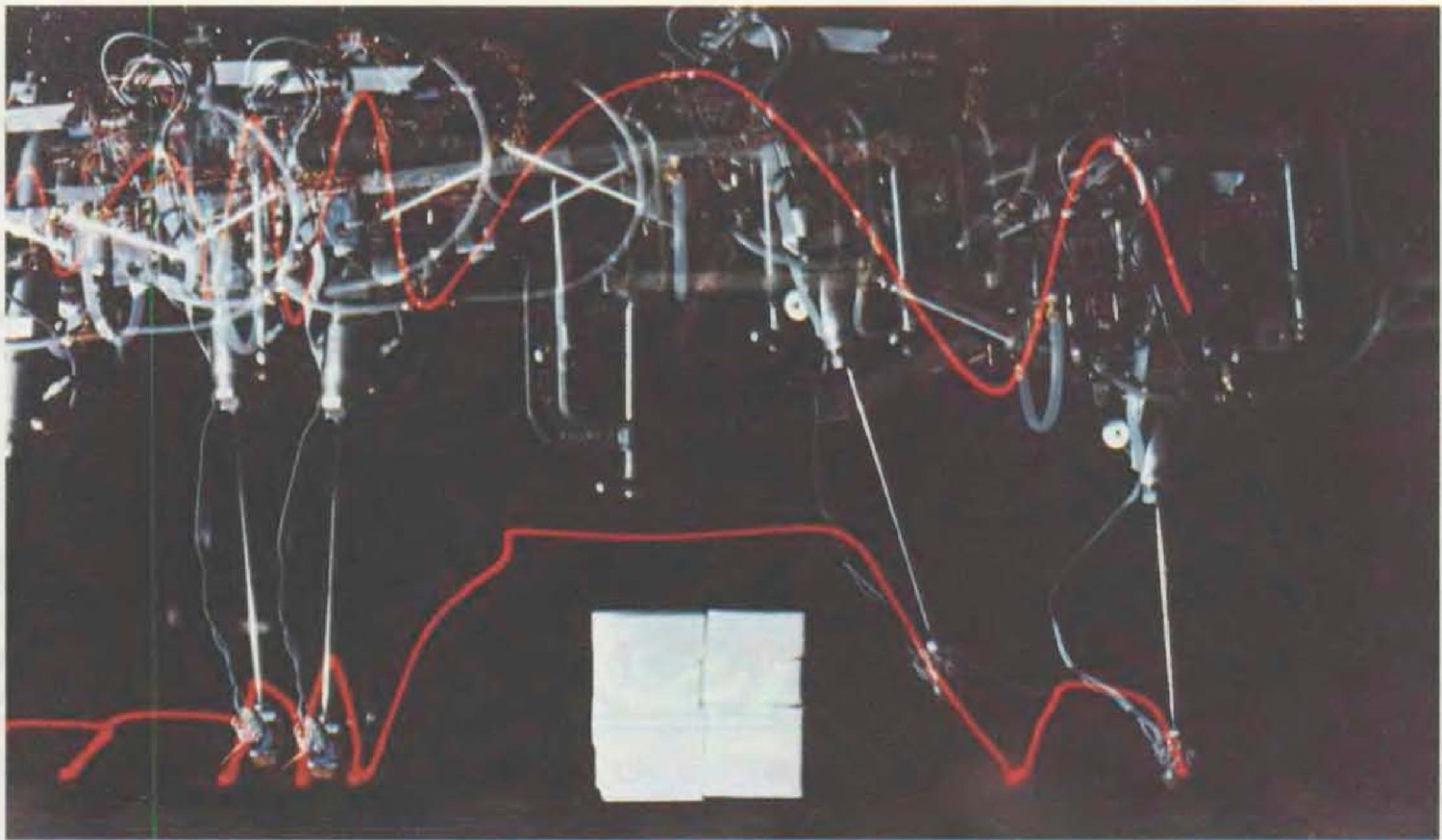
ПРЫЖКОВОЕ ДВИЖЕНИЕ прыгающей машины, совершаемое ею, когда она перескакивает через препятствие. Перед препятствием машина производит корректировку шага, чтобы правильно установить стопу для прыжка. За один шаг до препятствия в исполнительном механизме создается максимальное напряжение, чтобы увеличить высоту последующего прыжка. В полете нога укорачивается, чтобы не задеть препятствие. Сервомеханизм машины направляет ногу под требуемым углом для приземления, и перед приземлением нога удлиняется. Высота препятствия 15 см.
Поскольку опору машине обеспечивают сразу несколько ног, управляющая ЭВМ должна решать и третью задачу — распределять между ногами опорное усилие и поперечные (боковые) нагрузки. При походке с опорой на треножник распределение опорного усилия, очевидно, задается геометрией трех ног, обеспечивающих опору. Если же для опоры используется большее число ног, то управляющая ЭВМ должна решить задачу более высокого порядка и рассчитать оптимальное распределение нагрузки, обеспечив плавность движения и минимальное давление на грунт. Задачу распределения боковой на-грузки на стопы ног управляющая программа решает даже в том случае, когда машина опирается всего на три ноги. Решение этой задачи можно свести к исключению маневрирования стоп при выборе точек опоры на грунте. Расчет распределения боковых усилий в случае большого количества ног, участвующих в опоре, сопряжен с выполнением огромного объема вычислений. Чтобы избавиться от этого отягощающего обстоятельства, мы в своей разработке ползающей машины предусмотрели пассивную гидравлическую систему, автоматически распределяющую боковые нагрузки.
Контроль за соблюдением допустимых пределов размещения ног с целью сохранения заданного направления движения машины — четвертая задача, решаемая управляющей ЭВМ. Геометрия ног может быть такой, что при движении они будут наталкиваться друг на друга. Во избежание поломок ЭВМ должна ограничить их возможное перемещение. Для повышения эффективности действия каждой ноги ее установка на поверхности земли должна рассчитываться с учетом заданных ограничений возможного ее положения, а также ожидаемого поведения машины, когда она займет положение стойки. Например, при выполнении правого поворота передние ноги машины должны выноситься далеко вправо, с тем чтобы она смогла совершить боковое перемещение. В машинах с автономным управлением положение ног может задаваться на основе расчета положения машины с упреждением. При управлении человеком правильный выбор местоположения каждой ноги связан с прогнозированием команд водителя на каждое следующее положение стойки.